|
| |
|

|
Orientação
Robot Indústriais
|
Os robot
indústriais devem a sua popularidade a possibilidade de efetuarem
obrigações repetitivas com precisão e repetibilidade elevada;para
interagir com o ambiente, são dotados de sensores que permitem de "saberem"
onde estam os objetos a manipularem.
Geralmente se trata de "tastatori", ou seja sensores sensivéis
ao contato.
Este é equivalente a um operário muito hábil mas cego, que reconhece as
peças ao trabalhar com o tato.
Os sensores de visão tem fornecido "olhos" ao robot,
orientando-lhe na manipulação das peças sem a necessidade de "tocá-las"
para reconhecer a posição e rotação.
|
|
|
 |
Temos
realizados muitos projetos de orientação robótica, seja com robot antropomorfi
(com braço similar ao braço humano) seja com portal (Sistema de
movimentação linear XYZ).
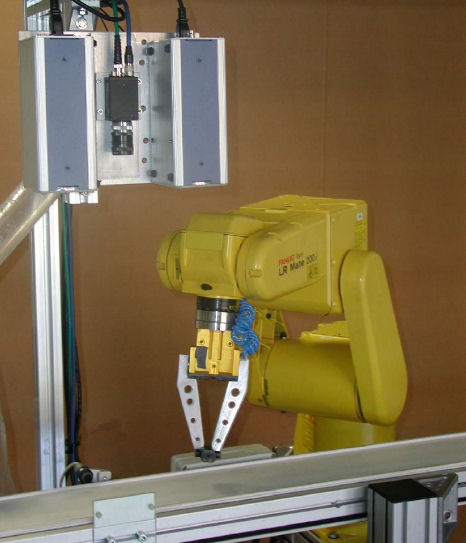
Em alguns casos é montada a telecâmera
diretamente sobre o sistema de presa, em outros é montada fixa,
observando a área de trabalho. |
Alguns
exemplos de realizações |
|
 
|
 |
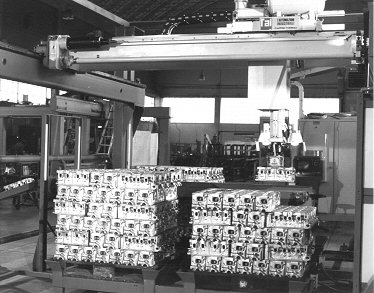
| A câmera observa
uma área do tapete, onde chegam as peças (Bombas de Injeções)
orientadas de modo casual, e envia ao robot (de tipo antropomorfo)as
coordenadas e os ângulos de rotações de duas peças por vez. O robot
assim poderá prender as peças do tapete em modo correto e
posicioná-las com precisão na máquina operadora. |
|
Torneria Meccanica Rabitti - Reggio Emilia - Itália
|
-----
|
|
 |
 |
A câmera, neste
caso, é montada sobre o sistema de presa do portal.
O motivo é de permitir a retirada precisa das árvores de distribuição
das bandejas onde estam depositadas.O Robot se posiciona no lugar
"teórico" onde deveria estar a árvore, e a câmera informa
ao robot a correção a ser feita sobre os eixos X, Y, Z e q
(ângulo).
Um procedimento de auto- aprendizagio da calibração, finaliza a
aplicação
|
Mercedes Benz - BadCanstatt
-Alemanha
|
Referência:
 | FIAT AUTO -
Cassino - Itália |
| Mercedes Benz - BadCanstatt -Alemanha |
| Torneria Meccanica Rabitti - Reggio Emilia - Itália |
| TechnoCar
- Vicenza - Itália
|

|
![[Company Logo Image]](../_borders/BadRobot1.gif)